Complex Object Manipulation & Human-Machine Interaction
Complex Object Manipulation & Human-Machine Interaction
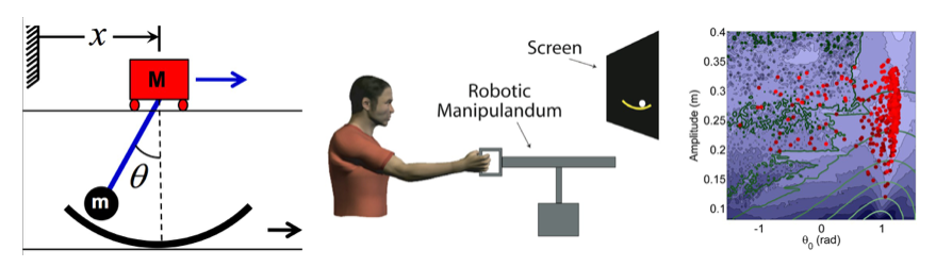
Professor Dagmar Sternad, Biology, Electrical and Computer Engineering and Physics, recently received a $700,000 National Science Foundation grant title, “Learning to Control Dynamically Complex Objects” to improve human-robot interaction by exploring how humans manipulate complex objects and tools. Insights gained from the three-year grant, awarded to both Sternad and her collaborator, Professor Neville Hogan, Mechanical Engineering at MIT, may have significant implications for robot-assisted rehabilitation of individuals with impaired motor skills.
Achieving a deeper understanding of how humans control voluntary movement is one of the key objectives of Sternad’s research – an area she describes as “a big black hole in scientific knowledge” – and an important step in ensuring safe cooperation between humans and robots.
Affiliated Faculty: Dagmar Sternad