Coordination of Dyadic Object Handover for Human-Robot Interaction
Coordination of Dyadic Object Handover for Human-Robot Interaction
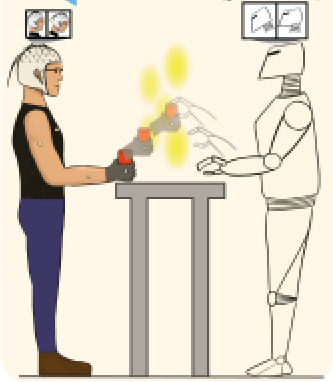
Coordination of Dyadic Object Handover for Human-Robot Interactions is a project funded by [NSF19b]. The team consists of Northeastern researchers, including Eugene Tunik, Mat Yarossi, Taskin Padir, and Deniz Erdogmus, who collectively bring expertise in motor behavior neuroscience, robotics, human-robot interaction, and machine learning. The objective is to model natural human-to-human object handover dynamics in order to develop robotic behavior strategies for more human-like human-to-robot and robot-to-human object handover.
Affiliated Faculty: Deniz Erdogmus and Taskin Padir in partnership with Eugene Tunik (College of Health Sciences).