Faculty Spotlight
Dr. Max Shepherd, Assistant Professor
With a joint appointment in Physical Therapy and Rehabilitation Sciences and Mechanical and Industrial Engineering, Dr. Max Shepherd focuses on improving locomotion through the design and control of wearable robotics. He joined Northeastern University in January 2022 after completing a postdoctoral fellowship at Georgia Tech in 2021. Previously, he served as a Visiting Scholar at Össur, an Icelandic prosthetics manufacturer, and as a Biomedical Engineer at X (formerly Google X), where his research focused on exoskeleton development.
Since joining Northeastern, both Dr. Shepherd and his students have received multiple distinctions. In 2024, PhD students Kathryn Lee and Nathan Carmichael were awarded NSF Graduate Research Fellowships, and in 2022, Fatima Tourk received the prestigious Clare Boothe Luce Fellowship, supporting women pursuing research in the physical sciences and engineering.
In 2025, Dr. Shepherd received the Faculty Innovation in Teaching or Scholarship Award from the Department of Physical Therapy, Movement, and Rehabilitation Sciences for his mentorship and work with students. His research is supported by the NSF, NIH, and the Congressionally Directed Medical Research Program (CDMRP). Most recently, he received a Spark Fund Award from Northeastern’s Center for Research Innovation to develop a Variable-Stiffness Ankle (VSA) prosthetic that adapts dynamically to users’ movements—transforming laboratory discoveries into commercially viable prototypes.


Research Focus: Building Better Exoskeletons
One of the other research projects the Shepherd Lab is tackling is the development of exoskeletons. Their research has been featured on the cover of Science Robotics and is funded by the National Science Foundation. Two of the biggest issues they face are wearability and versatility, and the lab is deeply focused on addressing these challenges.
For wearability, current prototypes are heavy, clunky, and difficult to put on and take off. The designs the lab is focused on building are lightweight, with the goal of using more foams, rubbers, and plastics. Their primary concern is maintaining stiffness in just the right places, as it is needed to help transmit exoskeleton forces to the body effectively while maintaining natural range of motion.
Current Research: The Uncertainty-Aware Framework
Complexity of movement is the second issue on which PhD student Fatima Tourk is currently focused. Her present research centers on ankle exoskeletons. While existing ankle exoskeletons perform well for specific trained tasks inside the lab, they struggle when encountering unfamiliar movements outside of it—especially when facing actions they were never trained on. Current exoskeletons incorporate machine learning tools, but they suffer from a critical limitation: when they receive sensor data outside their training distribution, they still make predictions and actuate, without knowing whether those predictions are accurate. As the research notes: garbage in, garbage out.
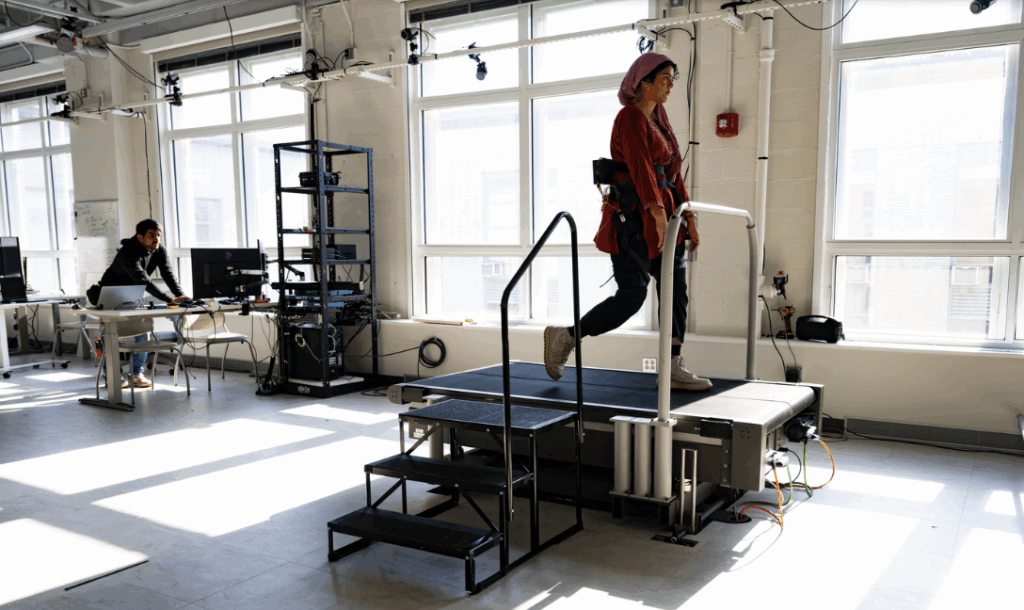
Dr. Shepherd, Fatima, and their team are working on an uncertainty-aware control framework—an uncertainty estimator that runs in parallel with existing controllers to determine whether incoming movements are familiar (in-distribution) or unfamiliar (out-of-distribution). When a participant performs a movement, the system evaluates whether the sensor data resembles the training data. If the movement is significantly different from what the exoskeleton was trained on, the uncertainty score increases and the exoskeleton automatically disengages, switching to zero impedance mode. The team trained this system using data from 9 participants walking and jogging on a treadmill at various speeds and inclines—establishing what “in-distribution” movements look like.
To create this uncertainty estimator, the team developed three architectures: model ensembles, autoencoders, and Generative Adversarial Networks (GANs). Each architecture was trained on the in-distribution data to generate uncertainty scores when processing new sensor inputs. In offline testing, the ensemble of gait phase predictors proved most accurate and required minimal tuning, leading to its selection for online testing.
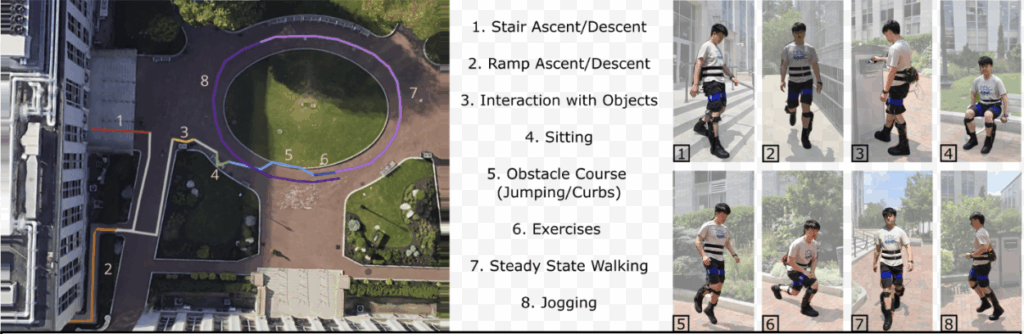
For the online evaluation, a novel user performed various actions on an outdoor course (Image 2) while two controllers ran in parallel on the ankle exoskeleton: a variable-speed ML controller (also developed by the Shepherd lab for walking and jogging) and the uncertainty estimator. The team measured how accurately the uncertainty estimator identified when to disengage the ML controller based on the user’s actions. Results showed high accuracy across most tasks, though the system needed improvement in two areas: transitions between in- and out-of-distribution tasks, and navigation of less steep stairs. Overall, the team successfully created an uncertainty-aware framework that enables ankle exoskeletons to operate safely across diverse scenarios by automatically disengaging when encountering unfamiliar movements.
Looking Ahead
Where does this research go next? The Shepherd Lab would be interested in three key areas for future development. First, they would like to create a version of the framework that extends beyond cyclic actions in the ‘in distribution’ section, allowing for more diverse and complex movements. Second, the team would be interested in testing the framework on other exoskeletons and assistive devices, including prosthetics, to demonstrate its broader applicability. Finally, they would like to improve the accuracy of the existing framework and conduct testing with individuals who have mobility impairments, moving closer to real-world implementation for those who need these technologies most.
Faculty Spotlight prepared by the Institute for Experiential Robotics, Northeastern University.